CyclePTZ: Método de controle baseado em aprendizado para sistemas de câmeras Master-Slave
[/trx_title]
Autores: Renan Oliveira Reis, Igor Henrique Dias, Raphael Prates, William Robson Schwartz
A pesquisa em sistemas de vigilância por vídeo tem aumentado significativamente nas últimas décadas. Tópicos relevantes, como reconhecimento facial, detecção de equipamentos de proteção individual e detecção de armas, requerem imagens de alta resolução para melhorar a precisão. Uma estratégia híbrida que combina câmeras fixas e PTZ (também conhecida como configuração master-slave) tem apresentado resultados consideráveis. Nesse tipo de sistema, câmeras fixas (master) e PTZ (slave) monitoram um cenário e são capazes de fornecer imagens de alta resolução das regiões de interesse.
Trabalhos tradicionais utilizam técnicas como homografia e calibração geométrica. Abordagens que requerem colaboração humana, o uso de marcações na cena, desconsideram diferentes planos na cena e muitas pessoas na cena. Todos esses fatores tornam esses métodos sensíveis e pouco usuais para sistemas automatizados. Com o recente sucesso das redes neurais usando imagens capturadas por câmeras PTZ em tópicos como detecção, segmentação e reconhecimento de pedestres, utilizar uma abordagem baseada em aprendizagem voltado para o domínio de câmeras permite o desenvolvimento de um sistema robusto, automático e adaptativo.
Neste trabalho, propomos a CyclePTZ, uma abordagem baseada em aprendizado para configurações master-slave. O método aprende automaticamente um mapeamento de correspondência entre as câmeras fixa e PTZ usando uma rede neural artificial com o ciclo de consistência (cycle-consistency). No domínio master-slave, o conceito ciclo de consistência funciona como um supervisor suplementar para o treinamento da rede neural. A abordagem é capaz de seguir alvos em diferentes planos e registrar pontos utilizados na criação do mapeamento entre as câmeras com várias pessoas na cena.
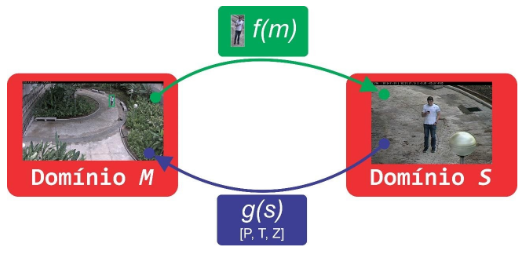
Figura 1 – Conceito do ciclo de consistência. O ciclo é representado pelas setas azuis e verdes, o Domínio M (master) e o Domínio S (slave).
Os resultados experimentais demonstram que a abordagem proposta é capaz de seguir alvos em diferentes planos e registrar pontos correspondentes com várias pessoas na cena. Além disso, comparamos o método proposto com a literatura atual em experimentos em tempo real que demonstram desempenho favorável do método CyclePTZ.