CyclePTZ: The Learning-based Control Method for Master-Slave Camera Systems
[/trx_title]
Authors: Renan Oliveira Reis, Igor Henrique Dias, Raphael Prates, William Robson Schwartz
Research on video surveillance systems has increased significantly in recent decades. Relevant topics, such as facial recognition, detection of personal protective equipment and detection of weapons, require high-resolution images to improve accuracy. A hybrid strategy that combines fixed and PTZ cameras (also known as master-slave configuration) has shown considerable results. In this type of system, fixed cameras (master) and PTZ (slave) monitor a scenario and are capable of providing high resolution images of the regions of interest.
Traditional works use techniques such as homography and geometric calibration. Approaches that require human collaboration, the use of markings in the scene, disregard different plans in the scene and many people in the scene. All of these factors make these methods sensitive and unusual for automated systems. With the recent success of neural networks using images captured by PTZ cameras on topics such as detection, segmentation and pedestrian recognition, using a learning-based approach aimed at the field of cameras allows the development of a robust, automatic and adaptive system.
In this work, we propose CyclePTZ, a learning-based approach for master-slave configurations. The method automatically learns a mapping of correspondence between the fixed and PTZ cameras using an artificial neural network with the cycle-consistency. In the master-slave domain, the consistency cycle concept acts as a supplementary supervisor for training the neural network. The approach is capable of tracking targets in different planes and recording points used to create the mapping between cameras with several people in the scene.
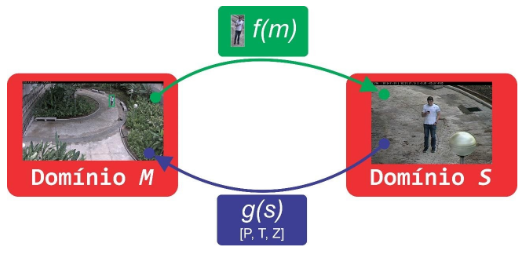
Figure 1 – Concept of the consistency cycle. The cycle is represented by blue and green arrows, Domain M (master) and Domain S (slave).
The experimental results demonstrate that the proposed approach is capable of following targets in different planes and recording corresponding points with several people on the scene. In addition, we compared the proposed method with the current literature in real-time experiments that demonstrate favorable performance of the CyclePTZ method.